
Blog
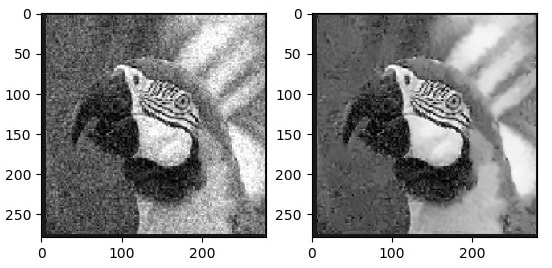
Teoría En capítulos anteriores, hemos visto muchas técnicas de alisado de imágenes como el desenfoque gaussiano, el desenfoque medio, etc. y fueron buenas en cierta medida para eliminar pequeñas cantidades de ruido. En esas técnicas, tomamos un pequeño vecindario alrededor de un píxel e hicimos algunas operaciones como el promedio ponderado gaussiano, mediana de los […]
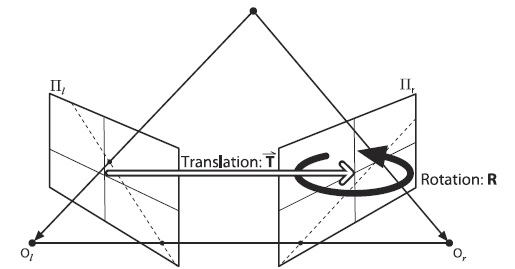
Conceptos básicos Cuando tomamos una imagen con la cámara, perdemos una información importante, es decir, la profundidad de la imagen. O qué tan lejos está cada punto de la imagen de la cámara porque es una conversión de 3D a 2D. Así que es una pregunta importante si podemos encontrar la información de profundidad usando […]
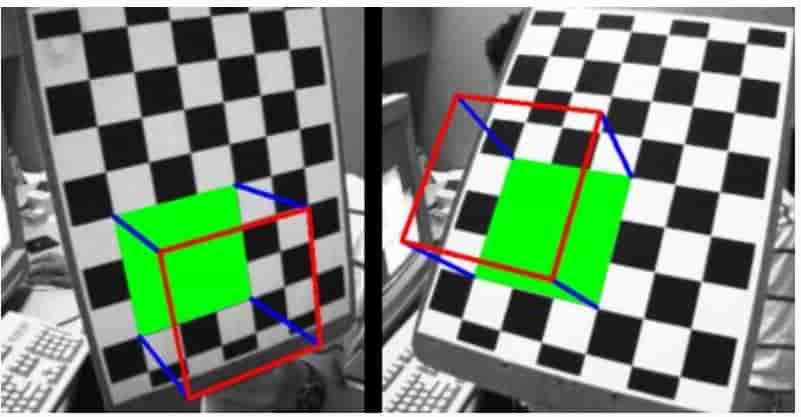
Fundamentos Esta va a ser una pequeña sección. Durante la última sesión de calibración de la cámara, se ha encontrado la matriz de la cámara, los coeficientes de distorsión, etc. Dada una imagen patrón, podemos utilizar la información anterior para calcular su posición, o cómo el objeto está situado en el espacio, como por ejemplo […]
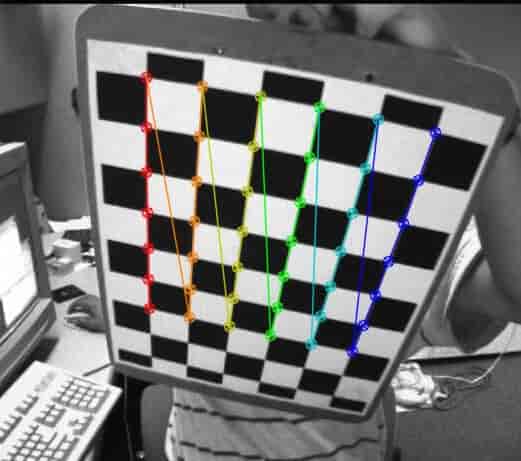
Fundamentos Las cámaras baratas de hoy en día introducen mucha distorsión en las imágenes. Dos distorsiones principales son la distorsión radial y la distorsión tangencial. Debido a la distorsión radial, las líneas rectas aparecerán curvadas. Su efecto es mayor a medida que nos alejamos del centro de la imagen. Por ejemplo, la imagen se muestra abajo. […]
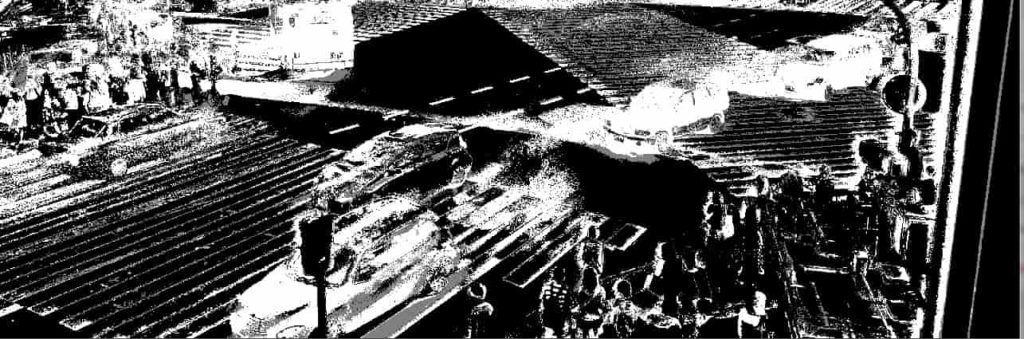
Fundamentos La resta de fondo es uno de los pasos más importantes del preprocesamiento en muchas aplicaciones basadas en la visión. Por ejemplo, considere los casos como el contador de visitantes donde una cámara estática toma el número de visitantes que entran o salen de la habitación, o una cámara de tráfico que extrae información […]

Flujo óptico El flujo óptico es el patrón de movimiento aparente de los objetos de la imagen entre dos fotogramas consecutivos causado por el movimiento del objeto o la cámara. Es un campo vectorial 2D donde cada vector es un vector de desplazamiento que muestra el movimiento de los puntos del primer cuadro al segundo. […]
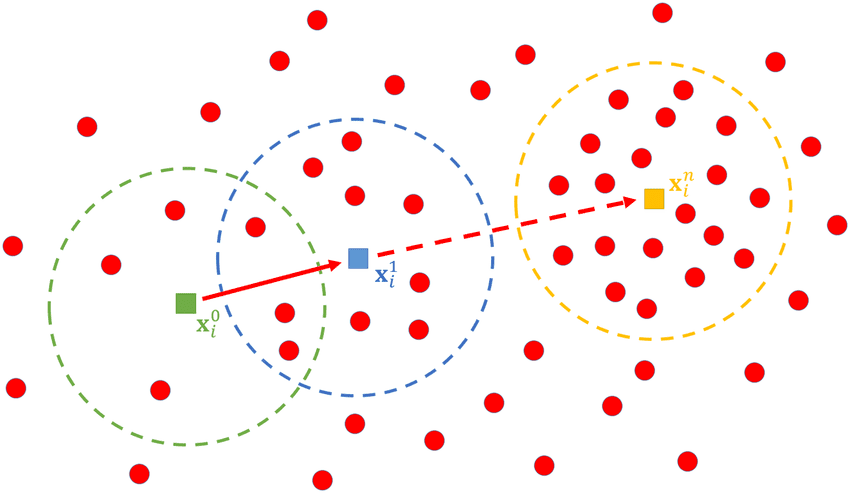
Desplazamiento medio Meanshift y Camshift La intuición detrás del cambio de medias es simple. Considere que tiene un conjunto de puntos. (Puede ser una distribución de píxeles como la retroproyección del histograma). Se te da una pequeña ventana (puede ser un círculo) y tienes que mover esa ventana al área de máxima densidad de píxeles […]
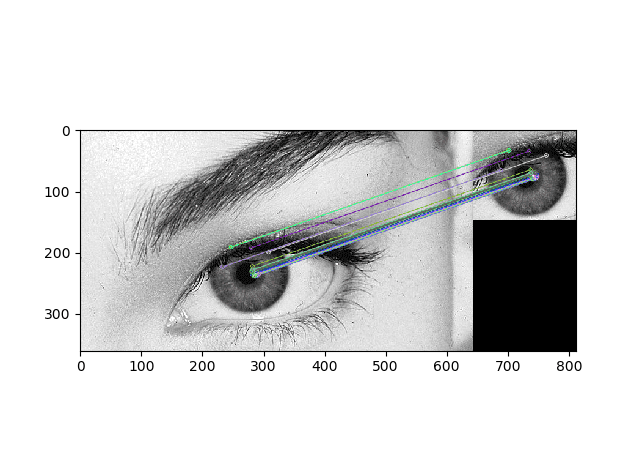
Conceptos básicos de Brute-Force Matcher Brute-Force matcher es simple. Toma el descriptor de una característica en el primer set y se empareja con todas las otras características en el segundo set usando un cálculo de distancia. Y el más cercano es devuelto. Para BF matcher, primero tenemos que crear el objeto BFMatcher usando cv2.BFMatcher (). […]
Teoría Como entusiasta de OpenCV, lo más importante del ORB es que proviene de “OpenCV Labs”. Este algoritmo fue criado por Ethan Rublee, Vincent Rabaud, Kurt Konolige y Gary R. Bradski en su trabajo ORB: Una alternativa eficiente a SIFT o SURF en 2011. Como dice el título, es una buena alternativa al SIFT y […]

Teoría Hemos visto varios detectores de características y muchos de ellos son realmente buenos. Pero al mirar desde el punto de vista de la aplicación en tiempo real, no son lo suficientemente rápidos. Un mejor ejemplo sería SLAM (Simultaneous Localization and Mapping) robot móvil que tiene recursos computacionales limitados. Como solución a esto, el algoritmo […]