
Blog
Veremos cómo hacer coincidir las características de una imagen con otras.
Usaremos el buscador de Brute-Force y FLANN Matcher en OpenCV
Conceptos básicos de Brute-Force Matcher
Brute-Force matcher es simple. Toma el descriptor de una característica en el primer set y se empareja con todas las otras características en el segundo set usando un cálculo de distancia. Y el más cercano es devuelto.
Para BF matcher, primero tenemos que crear el objeto BFMatcher usando cv2.BFMatcher (). Se necesitan dos parametros opcionales. El primero es normType. Especifica la medición de distancia a utilizar. Por defecto, es cv2.NORM_L2. Es bueno para SIFT, SURF etc (cv2. NORM_L1 también está). Para descriptores binarios basados en cadenas de texto como ORB, BRIEF, BRISK etc.. Se debe utilizar cv2.NORM_HAMMING, que utiliza la distancia de Hamming como medida. Si ORB está usando VTA_K == 3 o 4, se debe usar cv2.NORM_HAMMING2.
El segundo parámetro es variable booleana, crossCheck que es false por defecto. Si es cierto, Matcher devuelve sólo aquellos partidos con valor (i, j) de tal manera que el descriptor i-ésimo del set A tenga el descriptor j-ésimo del set B como mejor partido y viceversa. Es decir, las dos características de ambos conjuntos deben coincidir entre sí. Proporciona un resultado consistente, y es una buena alternativa a la prueba de relación propuesta por D. Lowe en papel SIFT.
Una vez creado, dos métodos importantes son BFMatcher. match () y BFMatcher. knnMatcher (). El primero devuelve el mejor partido. El segundo método devuelve k las mejores coincidencias donde k es especificado por el usuario. Puede ser útil cuando necesitemos hacer un trabajo adicional sobre eso.
Como usamos cv2.drawKeypoints () para dibujar puntos clave, cv2.drawMatches () nos ayuda a dibujar los partidos. Apila dos imágenes horizontalmente y dibuja líneas de la primera imagen a la segunda, mostrando las mejores coincidencias. Hay también cv2.drawMatchesKnn que sortea todos los mejores partidos de k. Si k=2, dibujará dos líneas de combate para cada punto clave. Así que tenemos que pasar una máscara si queremos dibujarla selectivamente.
Veamos un ejemplo para cada uno de SURF y ORB (ambos usan diferentes medidas de distancia).
Combinación de fuerza bruta con descriptores ORB
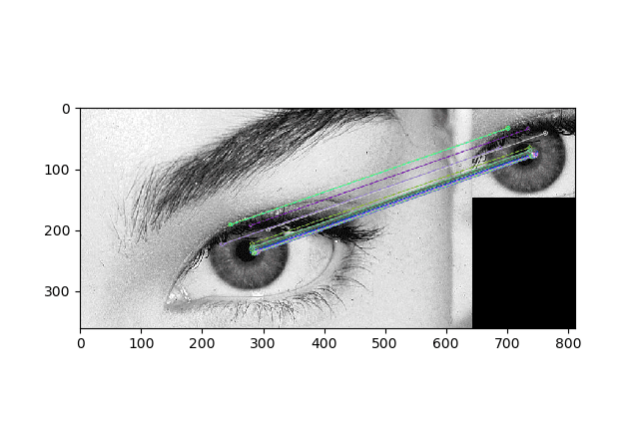
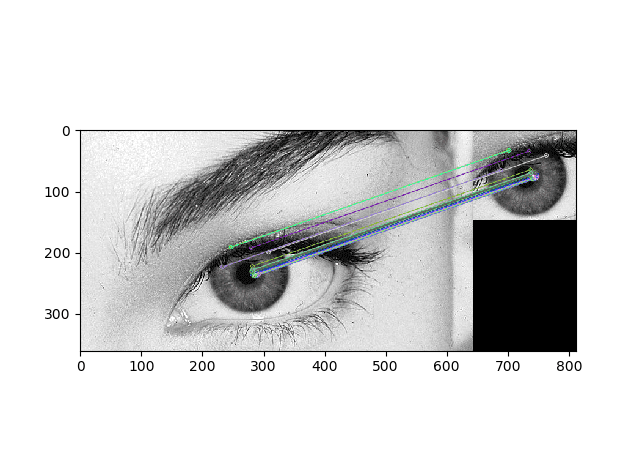
Aquí, veremos un ejemplo sencillo de cómo hacer coincidir las características entre dos imágenes. En este caso, tengo una consultaImagen y una imagen de un ojo. Intentaremos encontrar la consulta Imagen en trainImage usando la coincidencia de características.
Estamos utilizando descriptores SIFT para combinar las características. Así que vamos a empezar con la carga de imágenes, encontrar descriptores, etc.
A continuación creamos un objeto BFMatcher con medición de distancias cv2.NORM_HAMMING (ya que estamos usando ORB) y se activa el crosscheck para obtener mejores resultados. Luego utilizamos el método Matcher.match () para obtener las mejores coincidencias en dos imágenes. Los clasificamos en orden ascendente de sus distancias para que los mejores partidos (con baja distancia) lleguen al frente. Luego sorteamos sólo las primeras 30 coincidencias (sólo por razones de visibilidad, puedes aumentarlo como quieras).
Combinación de fuerza bruta con descriptores ORB código python:
import numpy as np
import cv2
from matplotlib import pyplot as plt
img1 = cv2.imread('ojo.jpg',0) # queryImage
img2 = cv2.imread('ojo4.jpg',0) # trainImage
#Iniciar detector SIFT
orb = cv2.ORB_create()
# Encuentra los puntos clave y descriptores con SIFT
kp1, des1 = orb.detectAndCompute(img1,None)
kp2, des2 = orb.detectAndCompute(img2,None)
# crea BFMatcher object
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# Match descriptors.
matches = bf.match(des1,des2)
# Clasifícalos en el orden de su distancia.
matches = sorted(matches, key = lambda x:x.distance)
# Dibuja las primeras 30 coincidencias.
img3 = cv2.drawMatches(img1,kp1,img2,kp2,matches[:30],None, flags=2)
plt.imshow(img3),plt.show()
¿Qué es este objeto Matcher?
El resultado de matches=bf.match (des1, des2) es una lista de objetos DMatch. Este objeto DMatch tiene los atributos siguientes:
- DMatch.distance – Distancia entre descriptores. Cuanto más bajo, mejor.
- DMatch.trainIdx – Índice del descriptor en descriptores de trenes
- DMatch.queryIdx – Índice del descriptor en descriptores de consulta
- DMatch.imgIdx – Índice de la imagen del tren.
 ¡Felicidades! Cuentas con conocimientos importantes de OpenCV hasta ahora.
¡Felicidades! Cuentas con conocimientos importantes de OpenCV hasta ahora.
Aprende mucho mas en nuestro Curso Python de OpenCV:
[…] ➡ Feature Matching / Comparación de funciones […]