
Blog
Aprendera utilizar la segmentación de imágenes basada en marcadores utilizando algoritmos de cuencas hidrográficas (Watershed)
Entender el uso de la función cv2.watershed()
Teoría
Cualquier imagen en escala de grises se puede ver como una superficie topográfica donde una intensidad alta indica picos y colinas, mientras que intensidades bajas indican valles. En este algoritmo se empieza por llenar cada valle aislado (mínimos locales) con agua de diferentes colores (etiquetas). A medida que el agua sube, dependiendo de los picos (pendientes) cercanos, el agua de diferentes valles, obviamente con diferentes colores, comenzará a fusionarse. Para evitar esto, se construyen barreras en los lugares donde se une el agua. Luego, se continúa el trabajo de rellenar con agua y construir barreras hasta que todos los picos estén bajo el agua. Así, las barreras creadas en este proceso, no son más que la segmentación de la imagen. Esta es la “filosofía” detrás del algoritmo Watershed.
Sin emabrgo, este enfoque da un resultado sobresegmentado debido al ruido o a cualquier otra irregularidad en la imagen. Así que OpenCV implementó un algoritmo de cuenca hidrográfica basado en marcadores en el que se especifican cuáles son todos los puntos del valle que se fusionarán y cuáles no. Es una segmentación de imagen interactiva. Lo que hacemos es dar diferentes etiquetas a nuestro objeto. De este modo, tendremos que etiquetar la región que estamos seguros de que es el primer plano o el objeto en sí con un color (o intensidad), y debemos etiquetar la región de la que estamos seguros que es el fondo y no el objeto, con otro color. Finalmente la región de la que no estamos seguros de nada la debemos etiquetar con 0. Ese es nuestro marcador. Sólo después de este etiquetado aplicamos el algoritmo Watershed. Entonces nuestro marcador se actualizará con las etiquetas que dimos, y los límites de los objetos tendrán un valor de -1.
A continuación, veremos un ejemplo sobre cómo usar la Transformación de distancia junto con el Watershed para segmentar objetos que se tocan mutuamente.
Considere la imagen de las monedas a continuación, las monedas se tocan entre sí. Incluso si lo limitas, se tocarán entre sí.

Comenzamos por encontrar una estimación aproximada de las monedas. Para eso, podemos usar la binarización de Otsu.
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('monedas.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)

Ahora necesitamos eliminar cualquier pequeño ruido blanco en la imagen. Para eso podemos usar la apertura morfológica. Para eliminar cualquier agujero pequeño en el objeto, podemos usar el cierre morfológico. Por lo tanto, ahora sabemos con certeza que la región cercana al centro de los objetos está en primer plano y que la región más alejada del objeto es el fondo. Solo la región de la que no estamos seguros es la región límite de las monedas.
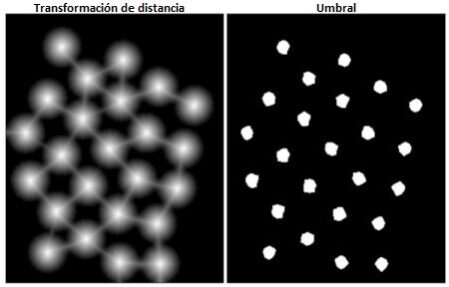
Entonces necesitamos extraer el área de la cual estamos seguros que son monedas. La erosión elimina los píxeles del límite. Entonces, lo que quede, podemos estar seguros de que es una moneda. Eso funcionaría si los objetos no se tocaran entre sí. Pero como se están tocando entre sí, otra buena opción sería encontrar la distancia de transformación y aplicar un umbral adecuado. Luego tenemos que encontrar el área que estamos seguros de que no son monedas. Para eso, dilatamos el resultado. La dilatación aumenta el límite del objeto al fondo. De esta forma, podemos asegurarnos de que cualquier región en el fondo en el resultado sea realmente un fondo, ya que la región límite se elimina. Vea la imagen a continuación:

# Eliminación del ruido kernel = np.ones((3,3),np.uint8) opening = cv2.morphologyEx(thresh,cv2.MORPH_OPEN,kernel, iterations = 2) # Encuentra el área del fondo sure_bg = cv2.dilate(opening,kernel,iterations=3) # Encuentra el área del primer dist_transform = cv2.distanceTransform(opening,cv2.DIST_L2,5) ret, sure_fg = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0) # Encuentra la región desconocida (bordes) sure_fg = np.uint8(sure_fg) unknown = cv2.subtract(sure_bg,sure_fg)
Vea el resultado en la imagen a la que se ha aplicado un umbral; se obtienen algunas regiones de monedas de las cuales estamos seguros de las monedas y que ahora además están separadas.
En algunos casos, puede interesarle solo la segmentación del primer plano, y no en separar los objetos que se tocan mutuamente. En ese caso, no necesita usar la transformación de distancia, basta con la erosión. La erosión es solo otro método para extraer el área de primer plano.

Ahora sabemos con certeza cuáles son las regiones de las monedas, que es parte del fondo y el resto. Ahora creamos marcador (es un arreglo del mismo tamaño que el de la imagen original, pero con el tipo de datos int32) y etiquetamos las regiones dentro de él. Las regiones que sabemos con certeza (ya sea en primer plano o en segundo plano) están etiquetadas con números enteros positivos, pero enteros diferentes, y el área que no sabemos con certeza simplemente queda en cero. Para esto usamos cv2.connectedComponents(). Con esta función etiquetamos el fondo de la imagen con 0, y el resto de los objetos quedan etiquetados con números enteros a partir de 1.
Pero sabemos que si el fondo está marcado con 0, el algoritmo de Watershed lo considerará como un área desconocida. Por tanto, queremos marcarlo con un número entero diferente. En cambio, marcaremos la región desconocida, definida como unknown, con 0.
# Etiquetado ret, markers = cv2.connectedComponents(sure_fg) # Adiciona 1 a todas las etiquetas para asegurra que el fondo sea 1 en lugar de cero markers = markers+1 # Ahora se marca la región desconocida con ceros markers[unknown==255] = 0

markers = cv2.watershed(img,markers) img[markers == -1] = [255,0,0]

 Con esta técnica podremos detectar las profundidades en nuestras imágenes. Toma nuestro curso Python de OpenCV para aprender a utilizar mas herramientas como esta:
Con esta técnica podremos detectar las profundidades en nuestras imágenes. Toma nuestro curso Python de OpenCV para aprender a utilizar mas herramientas como esta:
[…] ➡ Segmentación de Imágenes con el algoritmo de Warershed […]
hola, como puedo mostrar esas imágenes ¿que le falta al código?
cv2.imshow(“binarizada”,thresh)
cv2.imshow(“sin ruido”,opening)
cv2.imshow(“area de fondo”,sure_bg)
cv2.imshow(“area de frente”,sure_fg)
cv2.imshow(“distancia”,dist_transform)
cv2.imshow(“bordes”,unknown)
cv2.imshow(“regiones”,img)
No entiendo de dónde sale “binarizada”, “sin ruido”, etc… puesto que no están ni declarados y por ende, emiten errores.
“binarizada”,”sin ruido”, etc son el nombre de la ventana que se abre para mostrar cada una de las imágenes, posiblemente marque error por el tipo de comillas, pueden apostrofes (comillas simples) o comillas dobles