
Blog
Entender el concepto de Transformada de Hough.
Prender cómo usarlo para detectar líneas en una imagen.
Estudiar las siguientes funciones: cv2.HoughLines(), cv2.HoughLinesP()
Teoría
La transformada de Hough es una técnica popular para detectar cualquier forma, siempre que se pueda representar esa forma matemáticamente. Este algoritmo puede detectar una forma determinada incluso si está rota o un poco distorsionada. Veamos cómo funciona para una línea.
Una línea se puede representar como y = mx + c o en forma paramétrica, como  donde
donde  es la distancia perpendicular desde el origen a la recta, y
es la distancia perpendicular desde el origen a la recta, y  es el ángulo formado entre esta perpendicular a la recta y el eje horizontal, medido en sentido contrario a las agujas del reloj. Esta dirección varía según cómo represente el sistema de coordenadas. La que aquí se ha explicado es la representación que se usa en OpenCV (Vea la imagen debajo).
es el ángulo formado entre esta perpendicular a la recta y el eje horizontal, medido en sentido contrario a las agujas del reloj. Esta dirección varía según cómo represente el sistema de coordenadas. La que aquí se ha explicado es la representación que se usa en OpenCV (Vea la imagen debajo).

Por lo tanto, si la línea pasa por debajo del origen, tendrá un positivo y un ángulo menor que 180º. Si la línea va por encima del origen, el ángulo también se toma menor de 180º pero se toma negativo. Cualquier línea vertical tendrá 0º y las líneas horizontales tendrán 90º.
Ahora veamos cómo funciona la Transformada de Hough para líneas. Cualquier línea se puede representar unívocamente con estos dos parámetros, (, ). Primero debemos crear una matriz 2D o un acumulador (para mantener los valores de dos parámetros) y establecerlos en 0 inicialmente. Denotemos las filas como y las columnas como . El tamaño de la matriz dependerá de la precisión que necesite. Supongamos que quiere que la precisión de los ángulos sea de 1º grado, entonces necesitará 180 columnas. Para , la distancia máxima posible es la longitud de la diagonal de la imagen. Así, por ejemplo, si tomamos una precisión de 1 píxel, el número de filas podría ser igual a la longitud diagonal de la imagen.
Luego de aplicar el algoritmo, cada elemento de la matriz tendrá un valor igual a la suma de los puntos o píxeles que están posicionados en la línea representada por parámetros cuantificados (, ). De este modo, el elemento (en la posición (, ) en la matriz) con el valor más alto indicará la línea recta más representada en la imagen de entrada
Para entender esto mejor consideremos, por ejemplo, una imagen de 100x100 con una línea horizontal en el medio. Para cada para par (x, y) de la imagen el algoritmo comprueba cuáles rectas, definidas en la matriz mediante (, ), pasan por ese punto (x, y). Entonces, cada vez que un punto (x, y) pertence a una recta (, ), el contador corrspondiente se incrementa en 1. Supongamos que empezamos cogiendo el punto (x=0, y=50). Muchas de las rectas con parámetros (, ) pasarán por ese punto y podrán sus respectivos acumuladores en 1. Sin embargo sólo la recta de parámetros =50 y =90º seguirá acumulando por encima de 1. Es decir todos los puntos con coordenadas x=0,1,2… 100 e y=150, sumarán uno al contador de la celda =50 y =90º
Por lo tanto, si ahora buscamos en la matriz, los valores máximos en el acumulador, obtendremos que es el valor correspondiente a la celda (50,90º). Esto nos dice hay una línea en esta imagen a una distancia 50 del origen y en un ángulo de 90 grados. En la animación siguiente se muestra claramente como funciona este algoritmo (Imagen cortesía: Amos Storkey).

Así es como funciona la transformación para líneas. Es simple y puede ser implementarlo usando Numpy. Sin embargo, como debe imaginar, este algoritmo ya está implementado en OpenCV. A continuación se muestra una imagen de la matriz acumulador. Los puntos brillantes en algunas ubicaciones denotan los parámetros (, ) de posibles líneas en la imagen (tomado de Wikipedia).
Tranformada de Hough en OpenCV
, ), donde se mide en píxeles y se mide en radianes. El primer parámetro, la imagen de entrada, debe ser una imagen binaria, por lo tanto, aplique el umbral o use la detección de bordes astutos antes de aplicar la transformada de Hough. Los parámetros segundo y tercero son las precisiones en y respectivamente. El cuarto argumento es el umbral, es decir, el acumulado mínimo que debe obtener para que se le considere como una línea. Recuerde, el número de votos (acumulados) dependerá del número de puntos en la línea. Por lo tanto, este número de votos representa la longitud mínima de línea que debe detectarse.
import cv2
import numpy as np
img = cv2.imread('sudoku.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray,50,150,apertureSize = 3)
lines = cv2.HoughLines(edges,1,np.pi/180,200)
for rho,theta in lines[0]:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(0,0,255),2)
cv2.imwrite('houghlines1.jpg',img)

Transformada Probabilística de Hough
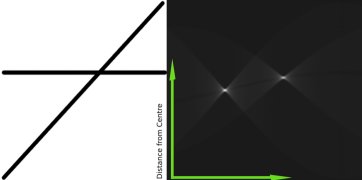
En la transformación de Hough, se puede ver que incluso para una línea con dos argumentos, se necesita mucha computación. La transformada probabilística de Hough es una optimización de la Transformada de Hough que vimos. No toma todos los puntos en consideración, en su lugar toma solo un subconjunto de puntos al azar y eso es suficiente para la detección de línea. Sólo se encesita disminuir el umbral. Vea la imagen a continuación que compara la Transformada de Hough y la Transformada Probabilística de Hough en un espacio amplio (tomado de la página de inicio de Franck Bettinger’s)

La implementación de OpenCV se basa en la detección robusta de líneas usando la Transformación probabilística progresiva de Hough, de Matas, J., Galambos, C. y Kittler, J.V .. La función utilizada es cv2.HoughLinesP(), la cual posee dos nuevos argumentos:
- MinLineLength: longitud mínima de la línea. Los segmentos de línea más cortos que esto son rechazados.
- maxLineGap: espacio máximo permitido entre los segmentos de línea para tratarlos como una sola línea.
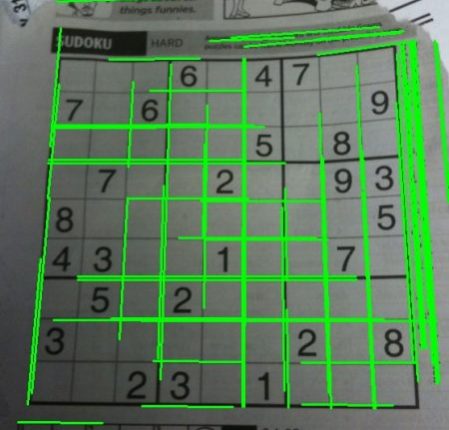
Lo mejor es que devuelve directamente los dos puntos finales de las líneas. En el caso anterior, solo la función sólo devuelve los parámetros de las líneas, y uno tiene que encontrar todos los puntos. En este caso, todo es mucho más directo y simple.
import cv2
import numpy as np
img = cv2.imread('sudoku.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray,50,150,apertureSize = 3)
minLineLength = 100
maxLineGap = 10
lines = cv2.HoughLinesP(edges,1,np.pi/180,100,minLineLength,maxLineGap)
for x1,y1,x2,y2 in lines[0]:
cv2.line(img,(x1,y1),(x2,y2),(0,255,0),2)
cv2.imwrite('houghlines2.jpg',img)

 Detectar líneas es una función muy útil en el manejo de imágenes ¡Felicidades por llegar hasta aquí!
Detectar líneas es una función muy útil en el manejo de imágenes ¡Felicidades por llegar hasta aquí!
Aprende de esto y mucho mas en nuestro curso Python de OpenCV:
[…] ➡ Transformada de Hough […]