
Blog
Aprender a determinar gradientes de una imagen, encontrar bordes, etc.
Utilizar las siguientes funciones: cv2.Sobel(), cv2.Scharr() y cv2.Laplacian().
Gradiente de Imágenes
El gradiente de una imagen mide cómo esta cambia en términos de color o intensidad. La magnitud del gradiente nos indica la rapidez con la que la imagen está cambiando, mientras que la dirección del gradiente nos indica la dirección en la que la imagen está cambiando más rápidamente. Matemáticamente, el gradiente se define por la derivadas parciales de una función dada (intensidad en el caso imágenes) a lo largo de las direcciones X e Y. Los puntos donde la derivada es máxima (o mayor que cierto umbral) corresponden a cambios de intensidad grandes, normalmente asociados a los bordes de los objetos en la imagen. Por lo tanto, este operador resulta particularmente útil para encontrar los bordes de las formas dentro de una imagen. En OpenCV existen tres tipos de filtros de gradiente (o filtros pasa altos), estos son : Sobel, Scharr y Laplaciano. En este capítulo se verán cada uno de estos filtros.
Derivadas Sobel y Scharr
Los operadores Sobel y Scharr no son más que aproximaciones, más o menos precisas, para calcular el gradiente de una imagen. Ambos se definen a través de kernels cuadrados como los estudiados en los filtros pasa bajos. El operador Sobel aplica un alisamiento Gausssiano común y estima las derivadas parciales a lo largo de X e Y. Utilizando los argumentos yorder y xorder, se puede especificar la dirección de las derivadas a tomar, vertical u horizontal, respectivamente. También se puede especificar el tamaño del kernel utilizando el argumento ksize. Cuando ksize = -1, se utiliza el kernel Scharr 3×3 que da mejores resultados que el kernel Sobel 3×3.
Derivadas Laplacianas
Este operador calcula el Laplaciano de la imagen, dado por la relación:
![]() ,
,
donde cada derivada se determina utilizando el operador Sobel. Por ejemplo, si ksize = 1, el kernel que se utiliza para filtrar es:

Código
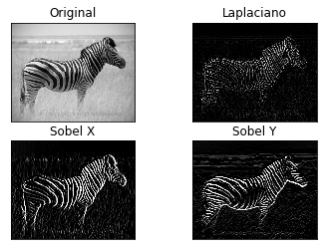
El código inferior muestra todos los operadores en un solo diagrama. Todos los kernels son de tamaño 3×3.
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('cebra.jpg',0)
laplacian = cv2.Laplacian(img,cv2.CV_64F)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
plt.subplot(2,2,1),plt.imshow(img,cmap = 'gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,2),plt.imshow(laplacian,cmap = 'gray')
plt.title('Laplaciano'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,3),plt.imshow(sobelx,cmap = 'gray')
plt.title('Sobel X'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,4),plt.imshow(sobely,cmap = 'gray')
plt.title('Sobel Y'), plt.xticks([]), plt.yticks([])
plt.show()

Note que mientras el filtro Sobel a lo largo de la dirección X no logra detectar la rayas horizontales, el filtro Sobel Y no puede detectar las rayas verticales. Por otro lado, las rayas diagonales son visibles utilizando cualquiera de los dos filtros dado que estas tienen las dos componentes, vertical y horizontal.
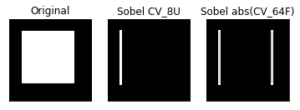
Un asunto importante!

Para evitar este problema y detectar ambos bordes, manteniendo la salida final en blanco y negro, la mejor opción es mantener el tipo de datos de salida en algunas formas superiores, como cv2.CV_16S, cv2.CV_64F etc; tomar su valor absoluto y luego convertirlo de nuevo a cv2.CV_8U. El código a continuación muestra este procedimiento para un filtro Sobel horizontal y las diferencias en los resultados.
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('whitebox.png',0)
# Utilizando cv2.CV_8U
sobelx8u = cv2.Sobel(img,cv2.CV_8U,1,0,ksize=5)
#Utilizando cv2.CV_64F. Luego toma el valor absoluto y hace la conversión a cv2.CV_8U
sobelx64f = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
abs_sobel64f = np.absolute(sobelx64f)
sobel_8u = np.uint8(abs_sobel64f)
plt.subplot(1,3,1),plt.imshow(img,cmap = 'gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2),plt.imshow(sobelx8u,cmap = 'gray')
plt.title('Sobel CV_8U'), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3),plt.imshow(sobel_8u,cmap = 'gray')
plt.title('Sobel abs(CV_64F)'), plt.xticks([]), plt.yticks([])
plt.show()
 Excelente! Ya puedes aplicarle degradados a tus imágenes.
Excelente! Ya puedes aplicarle degradados a tus imágenes.
¿Quieres saber mas de OpenCV? curso Python de OpenCV:
[…] ➡ Gradiente de Imágenes […]