
Blog
Encontrar objetos en una imagen usando el emparejamiento de plantillas
Entender las funciones cv2.matchTemplate() y cv2.minMaxLoc()
Teoría
El emparejamiento de plantillas (o template matching en inglés) es un método para buscar y encontrar la ubicación de una imagen de plantilla en una imagen más grande. OpenCV viene con la función cv2.matchTemplate() para este propósito. Esta función, simplemente, desliza la imagen de la plantilla sobre la imagen de entrada (como en la convolución 2D) y en cada punto compara la plantilla con la porción correspondiente de la imagen de entrada. En OpenCV están implementados varios métodos de comparación. La función devuelve una imagen en escala de grises, donde cada píxel indica cuánto coincide el entorno de ese píxel con la plantilla.
Si la imagen de entrada es de tamaño (WxH) y la imagen de la plantilla es de tamaño (wxh), la imagen de salida tendrá un tamaño de (W-w + 1, H-h + 1). Una vez que obtenga el resultado, puede usar la función cv2.minMaxLoc() para encontrar dónde está el valor máximo / mínimo. El valor máximo/ mínimo corresponde a la esquina superior izquierda del rectángulo con ancho w y alto h. Ese rectángulo será la región de la imagen de entrada que mejor coincide con la plantilla.
Emparejamiento de plantillas en OpenCV
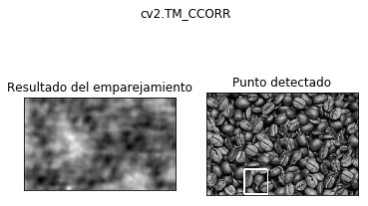
A continuación se comparará el desempeño de diferentes métodos de emparejamiento de la función cv2.matchTemplate(), para encontrar la cara de un hombre entre los granos de café:

A continuación se muestra el código que hace esto:
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('imagen.png',0)
img2 = img.copy()
template = cv2.imread('plantilla.png',0)
w, h = template.shape[::-1]
# All the 6 methods for comparison in a list
methods = ['cv2.TM_CCOEFF', 'cv2.TM_CCOEFF_NORMED', 'cv2.TM_CCORR',
'cv2.TM_CCORR_NORMED', 'cv2.TM_SQDIFF', 'cv2.TM_SQDIFF_NORMED']
for meth in methods:
img = img2.copy()
method = eval(meth)
# Aplica el emparejamiento de plantillas
res = cv2.matchTemplate(img,template,method)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
# Si el método es TM_SQDIFF o TM_SQDIFF_NORMED, tomar el mínimo
if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:
top_left = min_loc
else:
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
cv2.rectangle(img,top_left, bottom_right, 255, 10)
plt.subplot(121),plt.imshow(res,cmap = 'gray')
plt.title('Resultado del emparejamiento'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(img,cmap = 'gray')
plt.title('Punto detectado'), plt.xticks([]), plt.yticks([])
plt.suptitle(meth)
plt.show()






En este caso se observa que los seis métodos dan resultados similares. Sin embargo, esto puede variar dependiendo de la imagen y la plantilla en particular. Nótese que en los cuatro primeros gráficos a la izquierda el punto de máxima coincidencia es blanco (correspondiente con un máximo) mientras que, con los últimos dos métodos el punto de máxima coincidencia es negro (correspondiente con un mínimo)
Emparejamiento de plantillas con múltiples objetos
En la sección anterior, buscamos en la imagen la cara de un hombre, que aparece solo una vez en la imagen. Supongamos que está buscando un objeto que tiene múltiples ocurrencias, cv2.minMaxLoc() no le dará todas las ubicaciones. En ese caso, fijaremos un valor umbral por encima (o por debajo,dependiendo del método que usemos) del cual se asumirá que el objeto en la plantilla coincide con el objeto en la imagen. A continuación un ejemplo, en el que se muestra una captura de pantalla del famoso juego Mario. Utilizaremos el método explicado para encontrar todas las monedas.
import cv2
import numpy as np
from matplotlib import pyplot as plt
img_rgb = cv2.imread('mario.png')
img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY)
template = cv2.imread('moneda.png',0)
w, h = template.shape[::-1]
res = cv2.matchTemplate(img_gray,template,cv2.TM_CCOEFF_NORMED)
umbral = 0.8
loc = np.where( res >= umbral)
for pt in zip(*loc[::-1]):
cv2.rectangle(img_rgb, pt, (pt[0] + w, pt[1] + h), (0,0,255), 2)
cv2.imwrite('res.png',img_rgb)

 ¡Felicidades! Ahora sabes como encontrar objetos en imágenes con las que estés trabajando.
¡Felicidades! Ahora sabes como encontrar objetos en imágenes con las que estés trabajando.
Aprende mas de OpenCV con nuestro curso Python de OpenCV:
[…] ➡ Emparejamiento de Plantillas […]
Disculpa sabes como obtener las coordenadas de las coincidencias encontradas?
Algo que sea del tipo X= 350, Y= 400
Gracias